Introduzione
All’Università di Caen-Normandia (Francia), l’espressione “Plan de Rome” si riferisce a due oggetti complementari. Il primo è il grande plastico della Roma antica, creato da Paul Bigot all’inizio del XX secolo. Il suo nome si inserisce nella tradizione dei plastici in rilievo (plans-reliefs in francese), modelli in scala di città fortificate francesi prodotti tra il XVII e il XIX secolo. Il secondo oggetto è la ricostruzione virtuale interattiva della stessa città, sviluppata a partire dal 1994 dall’Equipe di Ricerca su Letterature, Immaginari e Società (ERLIS), con il supporto del Centro Interdisciplinare di Realtà Virtuale (CIREVE). Unici in Francia, questi due oggetti si completano a vicenda sia dal punto di vista educativo che da quello della ricerca.
Il plastico di Paul Bigot

Il “Plan de Rome” è un plastico in gesso di circa 70 m² (11 m x 6 m), realizzato in scala 1:400, che rappresenta 3/5 della città di Roma all’epoca di Costantino, all’inizio del IV secolo d.C. Il suo autore, l’architetto Paul Bigot (nato a Orbec nel 1870, morto a Parigi nel 1942) vincitore del Gran Premio di Roma nel 1900, dedicò la maggior parte della sua vita a quest’opera di ricostruzione della città di Roma.
Quando una copia fu inviata al Musée du Cinquantenaire di Bruxelles nel 1936, il plastico di P. Bigot fu elogiato da storici rinomati come André Piganiol o Jérôme Carcopino:
Rythme. Publication de la Société Centrale d’Architecture de Belgique, 9, 1, 1951, p. 22, J. Carcopino : «Paul Bigot, disinteressato ai guadagni materiali, che non ha mai né cercato, né ottenuto, e insensibile anche agli onori, che gli sono giunti spontaneamente, è stato felice, pienamente felice, di quella felicità espressa nel suo sorriso sottile e di cui godono solo coloro la cui età matura ha realizzato le aspirazioni della giovinezza; coloro che, troppo fieri per essere vanitosi, sanno quanto valgono e hanno fede nel destino indistruttibile della loro opera».
Rythme. Publication de la Société Centrale d’Architecture de Belgique, 9, 1, 1951, p. 23, A. Piganiol : «non è sufficiente riconoscere a Bigot la scienza e l’intuizione di un archeologo molto competente … [la sua opera] non è solamente la ricostruzione di un antiquario, ma la realizzazione di un sogno d’artista».
© Université de Caen-Normandie, Plan de Rome
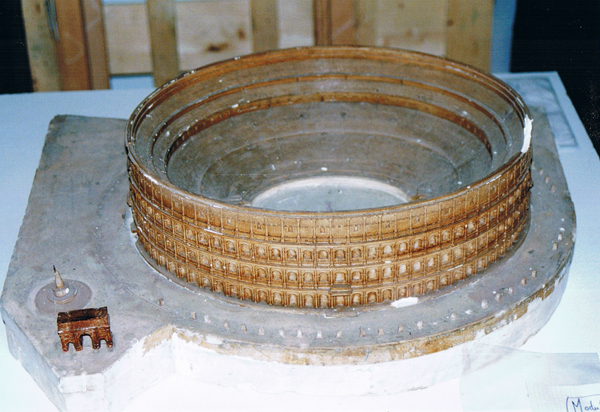
Ogni modulo poteva essere costituito, a seconda delle necessità, da diverse parti, in modo da facilitare i calchi e l’aggiornamento.
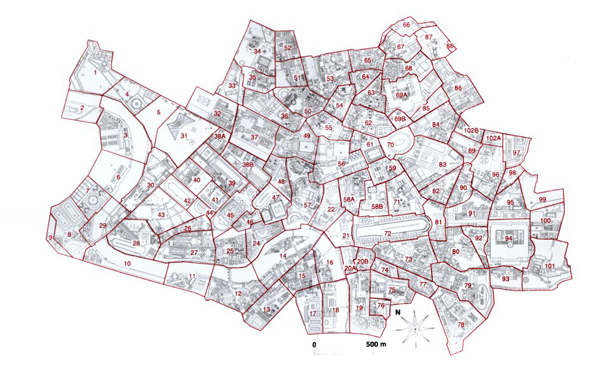
Ben più che una semplice opera d’arte, il plastico di Paul Bigot è un vero e proprio oggetto di ricerca scientifica che integra con straordinaria precisione l’insieme delle conoscenze dell’epoca sulla topografia della Roma antica. Paul Bigot lavorava ovviamente su tutte le fonti antiche (fonti scritte, iconografiche e archeologiche) e il suo sguardo da architetto-archeologo gli permetteva di sintetizzarne l’insieme, la cui complessità è apprezzabile ancora oggi. Una delle migliori prove della precisione di questo lavoro deriva dal confronto tra il plastico di Bigot e un’immagine satellitare della città moderna dove si individuano facilmente i principali edifici della Roma antica. Tanto nel posizionamento degli edifici quanto nella definizione del tracciato viario, Paul Bigot ha compiuto un lavoro eccezionale, coniugando le considerazioni scientifiche all’aspetto estetico dell’opera.

In occasione dei lavori di restauro del plastico realizzati nel 1995, le correzioni effettuate sui moduli nel corso degli anni sono apparse ben visibili. Si stima che circa 29 moduli sono stati oggetto di trasformazioni alla luce del costante progresso nella conoscenza della Città eterna.
Lasciato in eredità all’Università di Caen, classificato come monumento storico, il plastico di Roma fu all’inizio conservato nei sotterranei dell’edificio di Giurisprudenza, dove fu esposto per la prima volta.

In seguito alla costruzione nel 1995 della Maison de la Recherche en Sciences Humaines (Centro di Ricerca in Scienze Umane) dell’Università di Caen-Normandie, il plastico, dopo essere stato restaurato, vi fu trasferito ed esposto, diventando in un certo senso un simbolo. Oggi, grazie al lavoro di restituzione virtuale, il plastico esce dalle mura dell’edificio per essere accessibile al mondo intero.
“Plan de Rome” virtuale
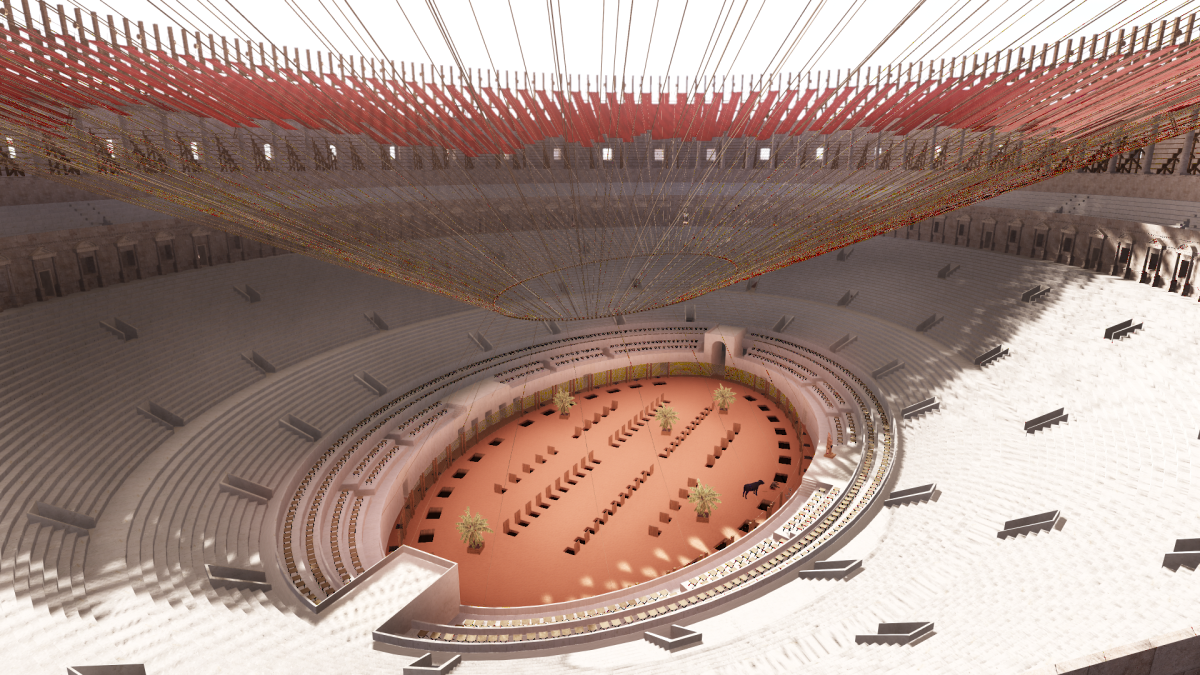
La versione digitale di “Plan de Rome” è un modello virtuale interattivo che rappresenta Roma alla stessa epoca del plastico di Paul Bigot. L’obiettivo finale è una ricostruzione di tutti gli esterni (strade, abitazioni, spazi commerciali, monumenti pubblici, reti di approvvigionamento idrico, ecc.) e di una parte degli interni (gli edifici pubblici più noti e alcuni esempi di abitazioni e negozi). Anche i sistemi meccanici sono ricostruiti. Il corpus delle fonti scritte, archeologiche e iconografiche utilizzato per le ricostruzioni è connesso al modello digitale.
“Nocturnes du Plan de Rome”

Il progetto “Plan de Rome” ha sia una prospettiva di ricerca scientifica che una componente educativa e di divulgazione della conoscenza. È in questo contesto che nel 2007 è nata l’idea dei “Nocturnes du Plan de Rome”. L’ambizione non era solo quella di rivolgersi a ricercatori e studenti, ma anche di attrarre all’Università un pubblico più diversificato per condividere i risultati delle ultime ricerche condotte nel laboratorio. Le conferenze sono composte da due parti: un’introduzione al tema trattato e una visita interattiva alla parte corrispondente della maquette virtuale della Roma antica. Le conferenze vengono trasmesse in diretta (YouTube) e registrate e la maggior parte di esse è sottotitolata in italiano. Ogni anno vengono trattati nuovi argomenti.
Macchine dell’Antichità

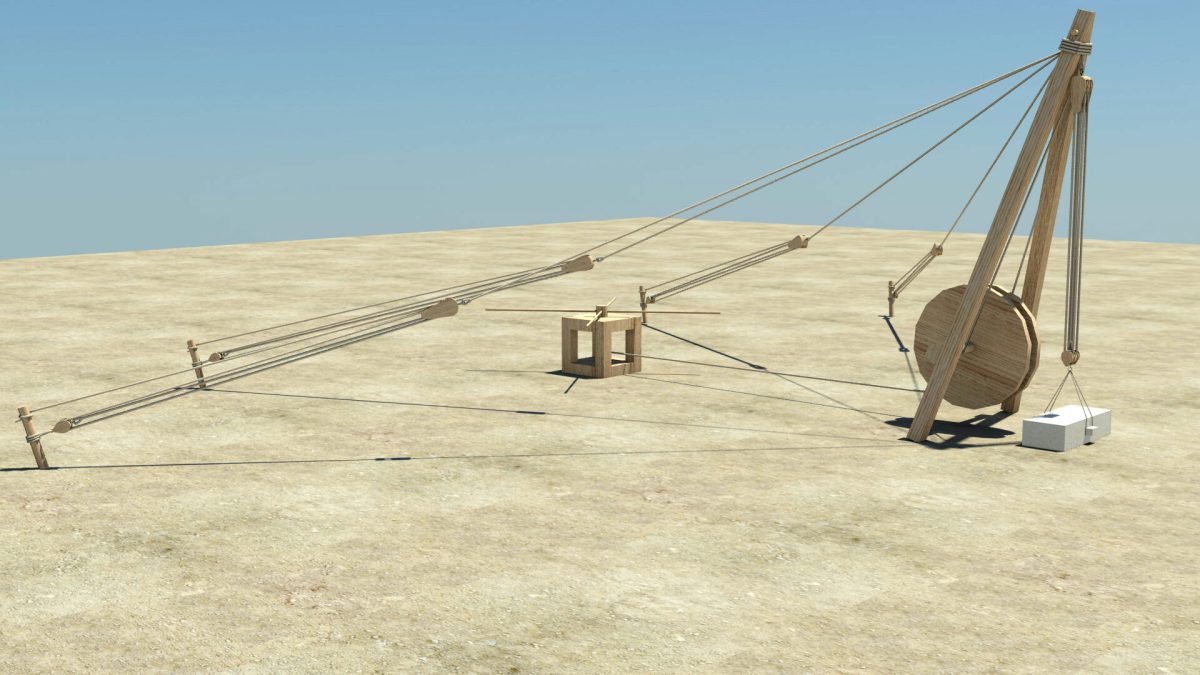
In continuità con il suo lavoro di realizzazione di un modello virtuale di Roma alla fine del periodo imperiale, l’equipe “Plan de Rome” porta avanti delle ricerche sui sistemi meccanici utilizzati durante l’Antichità. L’obiettivo è di realizzare dei modelli virtuali di questi sistemi generalmente molto ingegnosi, documentati scientificamente, e utilizzarli per far progredire la conoscenza, sia sul piano della ricerca che dell’insegnamento.
A causa della quantità limitata di informazioni a disposizione, si sanno poche cose in merito alle macchine dell’antichità. La nostra conoscenza della tecnologia e dell’ingegneria greco-romana proviene da tre fonti principali:
- I testi. La letteratura tecnologica in senso stretto è costituita da un numero limitato di testi che possono essere stati soggetti a distorsione nel corso dei secoli. Anche riferimenti in altre fonti letterarie possono essere utili.
- L’iconografia. Sebbene l’interpretazione delle immagini possa spesso essere imprecisa, questa fonte è fondamentale.
- Le scoperte archeologiche. Le macchine rinvenute integralmente sono rare, dal momento che la maggior parte dei loro componenti in legno è andata perduta.
La restituzione virtuale può essere un apporto supplementare ai media convenzionali (testi e immagini 2D) in tre modi diversi:
- Oggetti e macchine possono essere visualizzati da diversi punti di vista e, se necessario, possono essere smontati. Inoltre, la trasparenza permette di vedere dei componenti che altrimenti rimarrebbero nascosti.
- A scopo dimostrativo, è possibile simulare le macchine in azione.
- È possibile verificare diverse ipotesi in merito alla restituzione, per quanto riguarda lo studio della fattibilità, dell’efficacia e della funzionalità delle macchine.